Our New Pod
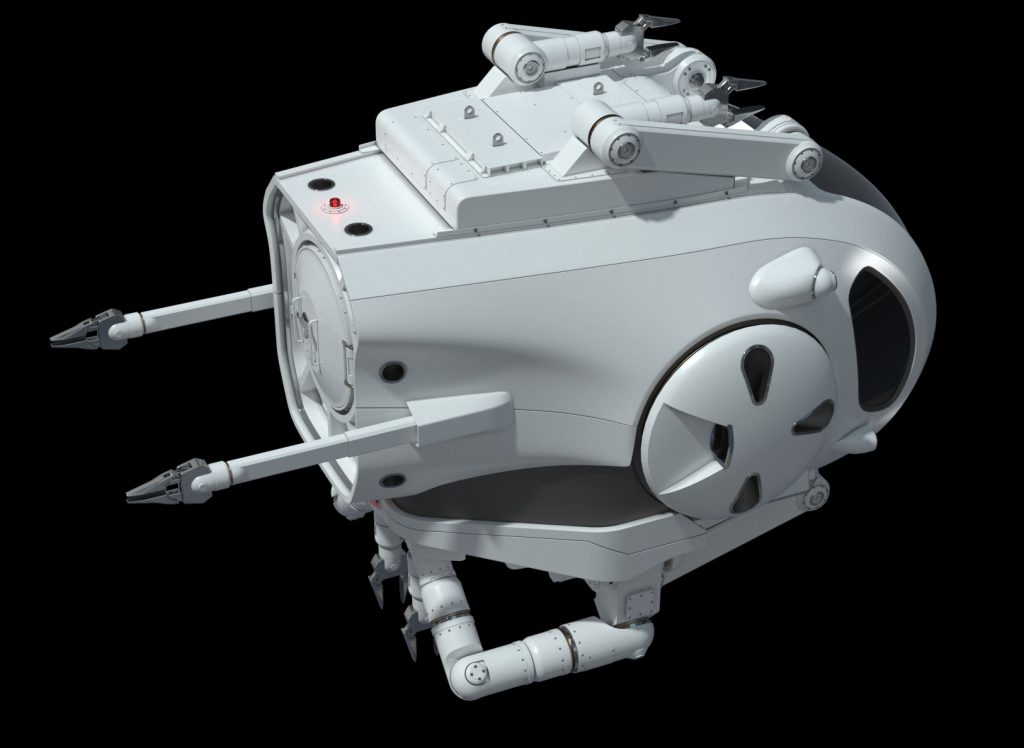
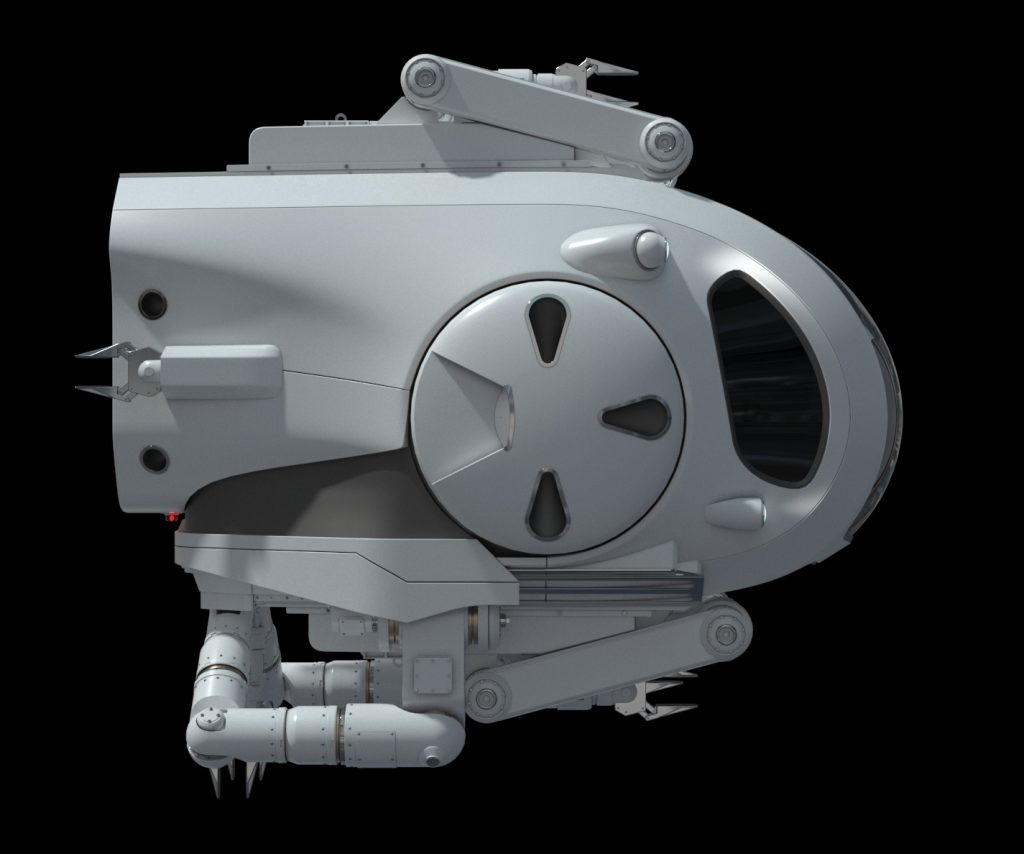
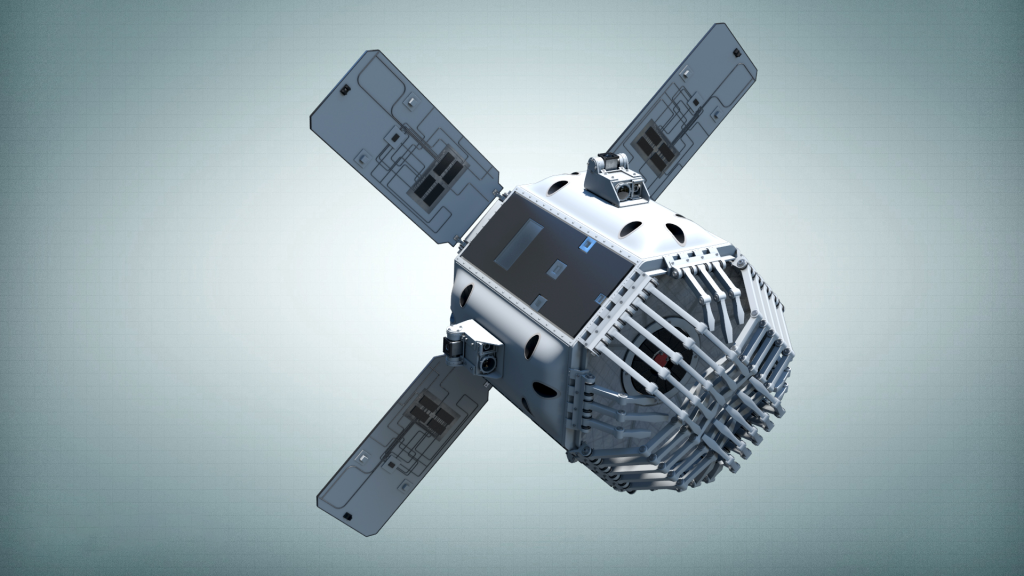
Long overdue, we have designed a pod that serves the needs of space construction projects large and small. The Hatship* class Pod is equipped with many arms and a propulsion system designed for movement in any direction, pushing or pulling a load. The bubble canopy depiction is influenced by helicopter designs that allow the pilot to have a wide, unrestricted view of the construction site.

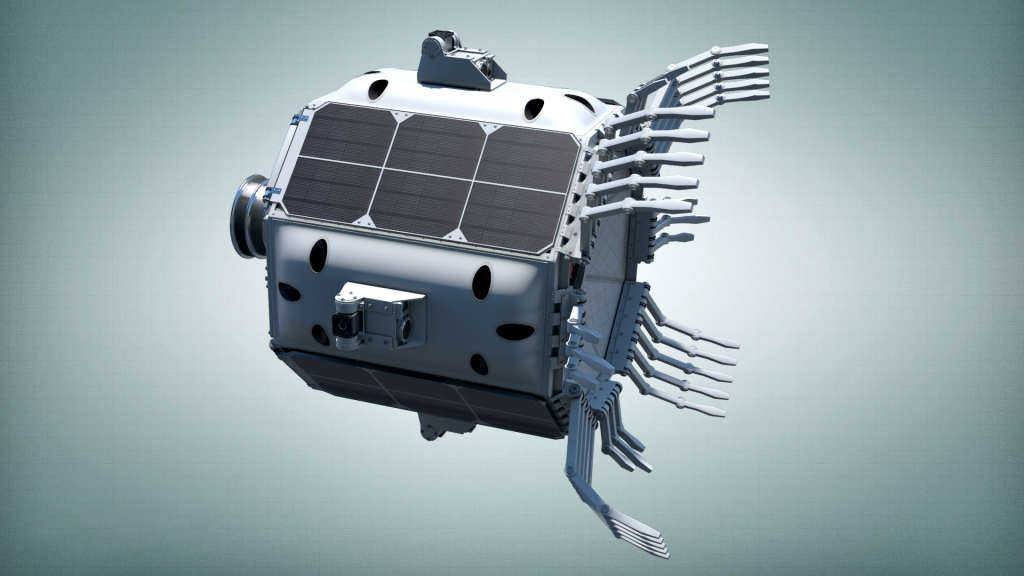
Removable Arms
The removable arm packages allow for a broad range of applications to be mounted on the pressure hull. This is vital to the mission the pod will serve. The new pod will also be able to refuel and recharge quickly and frequently.

The Clamp Arms
The clamp arms are designed to allow the Pod to secure itself to a load to move it to another location or to adhere itself to the station’s hull for maintenance in a secure 3-dimensional manner.
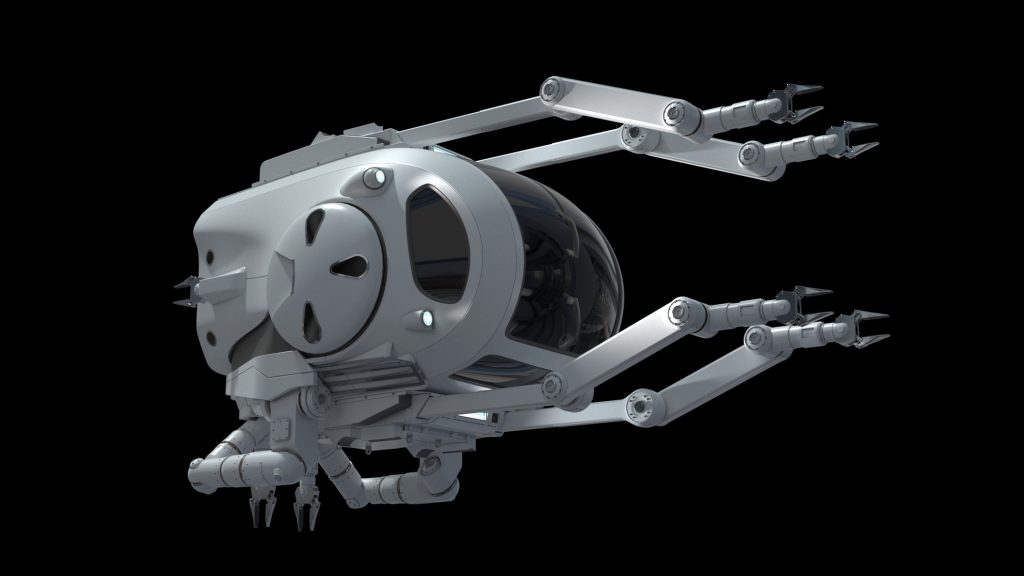
The Manipulator Arms
The Manipulator arms allow the Pod to weld, tap, drill, bolt, or handle items as a person on the ground would using a collection of interchangeable end-effectors.

Tow Arms
Rear-facing Tow-arms let the pod work in conjunction with other pods to maneuver heavy loads and large-sized objects into position.
Evolution:
Our pod design will find uses beyond construction as it is enlarged to accommodate more people or cargo (Enheduanna Class). STVs will transport large cargos and 100’s of passengers between station communities but a pod able to transport 4 people will be needed when only a few people need to go. Exploration and space mining are other obvious applications, but as we build these space vehicles they will find more uses beyond what we can imagine at this time. Offworld sedan?
Want to take it for a spin?
Drones for Space Construction
We will develop drones designed to be operated at large space construction work sites.
How will they work?
An astronaut inside the space construction control station will type into the database where they will be working and what tools and parts they will carry with them. The software will check that each of the drones has this information in its database for recognition and recovery, should they begin to drift away unnoticed by the astronaut. At the start, we envision three types of drones.
Observer Drones:
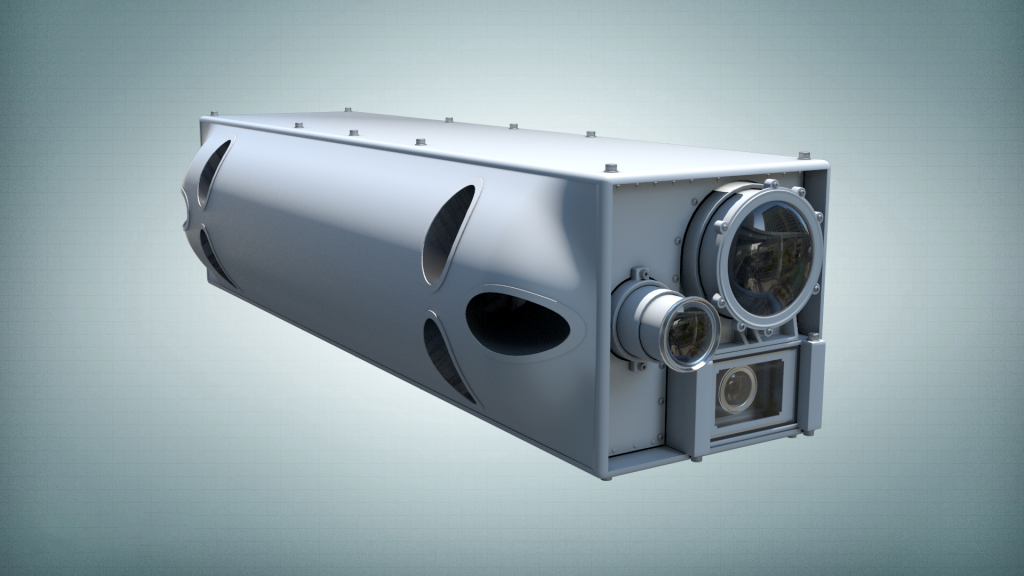
Small Observer drones will be employed to see close-ups of weld jobs and assembly operations by bots and pods. They will also be employed for deep space operations, mining facilities, and to check that shuttlecraft have their heat-shielding intact before reentry.
Medium-sized observers will watch over production machines creating modules and delivery operations.
Larger observer drones at cardinal points will give construction control a wide-angle view of the entire site and back up all the other drones to ensure nothing will float away undetected. These three classes of observer drones will give controllers a view of every part of the construction site at once.
Ambulatory Drones:
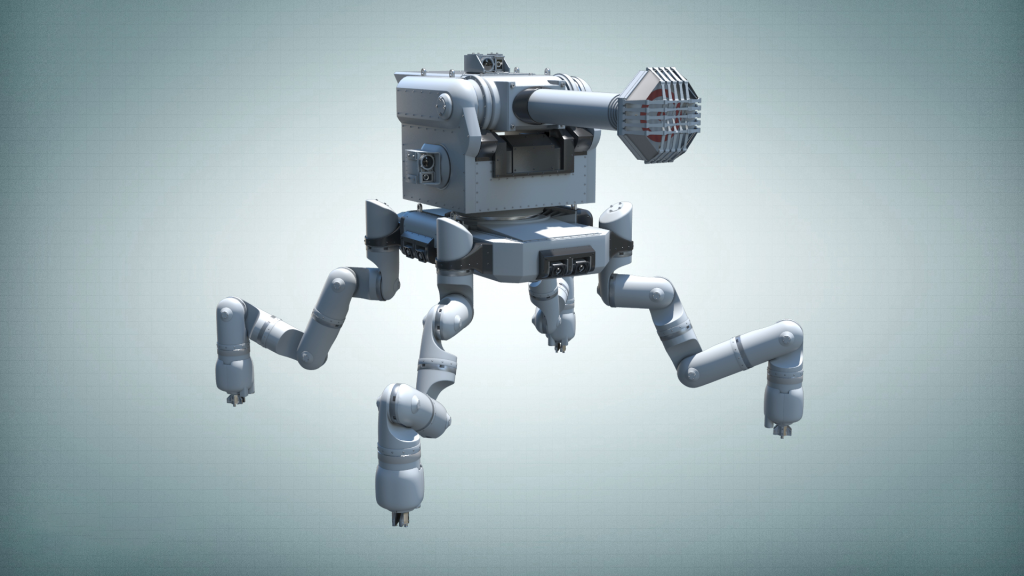
This second drone is an ambulatory-type drone. This drone has a lot of potential for future applications. This crawler-type drone is designed to work in close proximity to astronauts as they work on stations under construction or needing repairs.
This drone’s ambulatory mechanisms will allow for the development of many types of drones that move toolboxes, heavy batteries, and fuel cells into place as work sites need them. Right now, Astronauts have to drag toolboxes with them everywhere they go.
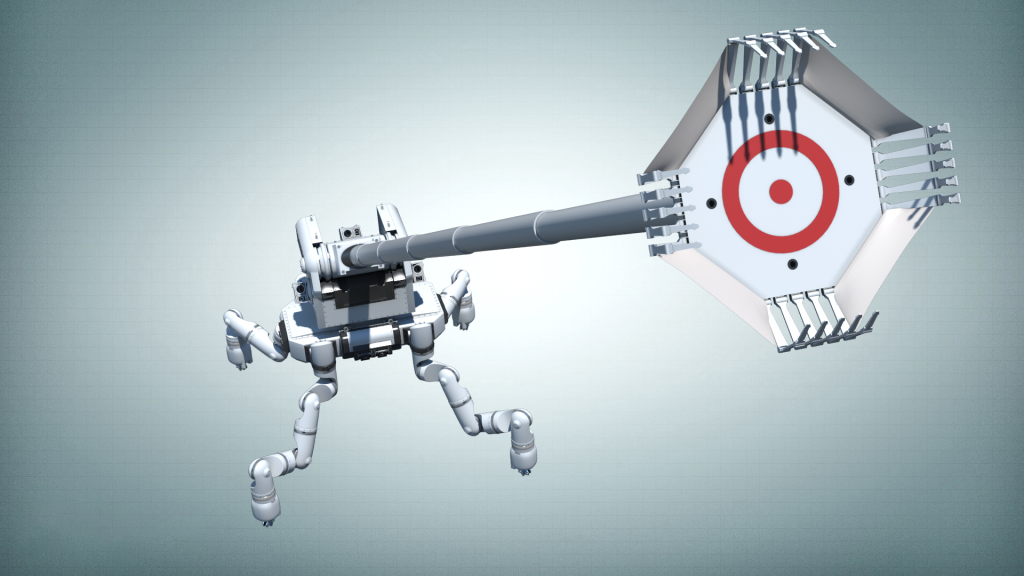
Ambulatory Drone With Retrieval Arm Extended
Retriever Drones
Like all these drone designs, retriever drones will be busy hunting down lost tools and parts, but will also become the worksite gofer. We envision many sizes of retriever drones, each suited to a specific task. But the smaller retriever drones will be used in many ways. For example, both astronauts and bots will tell retriever drones to fetch things from Tool Dispatch, saving them from leaving the worksite for the long time-consuming hand-over-hand walk back themselves. “Rover, fetch me a 10mm socket from TD”, says an astronaut from some distant part of the half-built structure. Shortly thereafter a small drone lifts off from its charging plate and then docks with a small port on the side of the Tool Dispatch module where a 10mm socket is ejected into Rovers “basket”. Rover then undocks, does a 180, and moves off to the waiting astronaut.
Other Space Construction Tools we will need.
MDA Canadarm2

MDA Dextre

New EVA Spacesuits

We Need You
We need people who are dedicated towards making VERA Station a reality.
Do you want to be a part of the future of humanity in space?
Invest with us today!

*Hatshepsut
*The name Hatship is short for Hatshepsut, the sixth Egyptian pharaoh of the 18th dynasty, she was one of the first great female rulers in history, and by far, the most successful women to rule Egypt as pharaoh. Hatshepsut’s dynasty is distinguished by her being a great builder, so we honor her by naming a vital piece of our construction inventory after her. She (Hatship) is going to build a lot of structures in space including space stations, spaceports, and fuel depots.
Before her death, Hatshepsut erected a pair of obelisks at Karnak. On one the inscription reads: “Now my heart turns this way and that, as I think what the people will say—those who shall see my monuments in years to come, and who shall speak of what I have done.”